
誰もが正確さについて話します。
しかし、構造が関節内で同じ結果を何千回も繰り返さなければならない場合、
まず重要なのは正確さではなく、構造です。
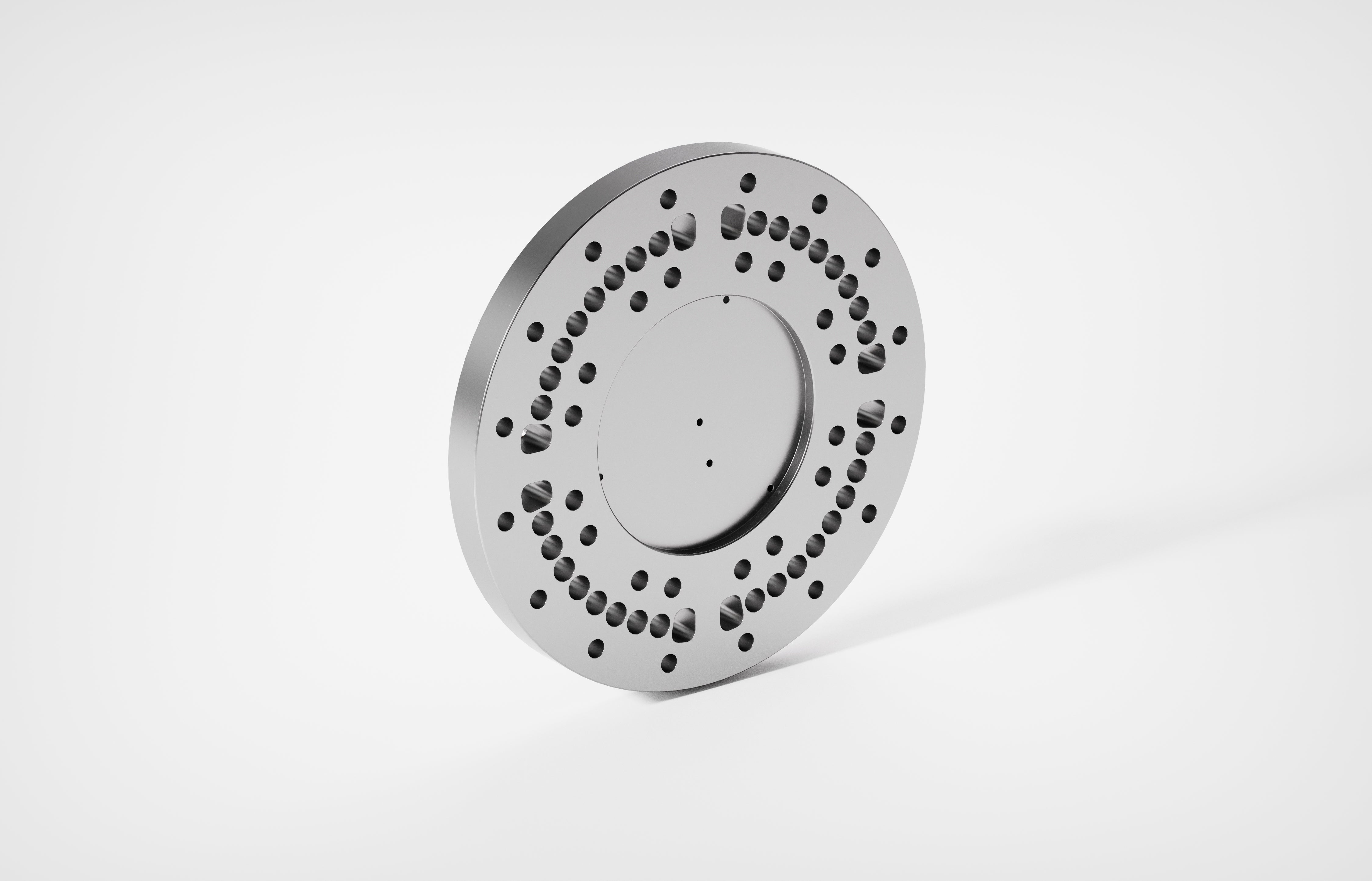
AL.Robotでは、力がどのように伝わるかから始めます
ひずみゲージがどのように応力を受けるかについて説明します。
FEM 解析、ひずみゲージの配置、自動検証。
私たちは訂正に頼りません。
私たちは最初からエラーを排除する構造の設計に重点を置いています。

主な特徴
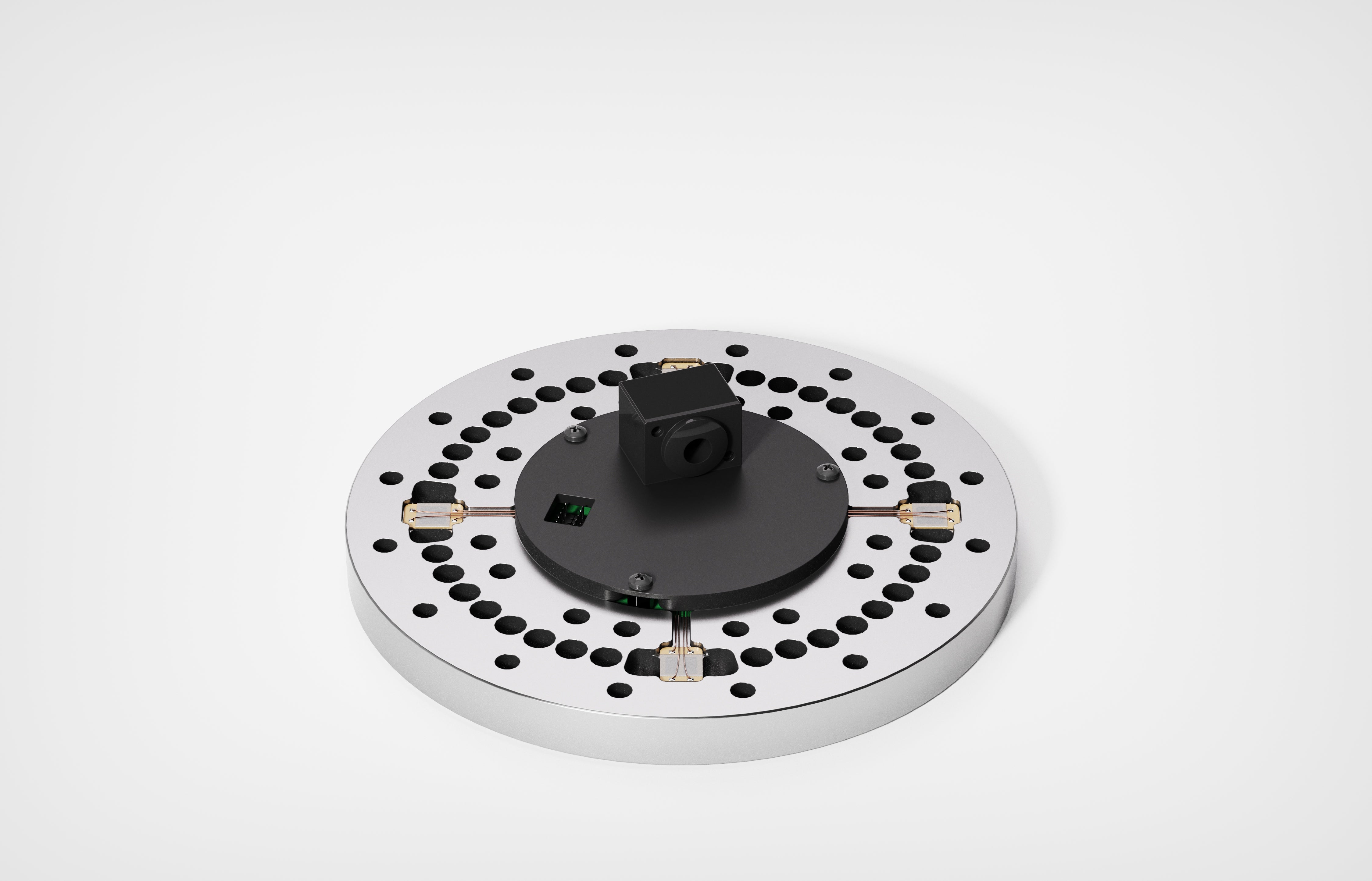
AL.Robot のジョイント トルク センサーは、高精度と耐久性を実現するように設計されており、さまざまなロボット アプリケーションに最適です。
これらのセンサーは、ロボットの関節のスムーズで効率的な動作に不可欠な正確なトルク測定を提供します。
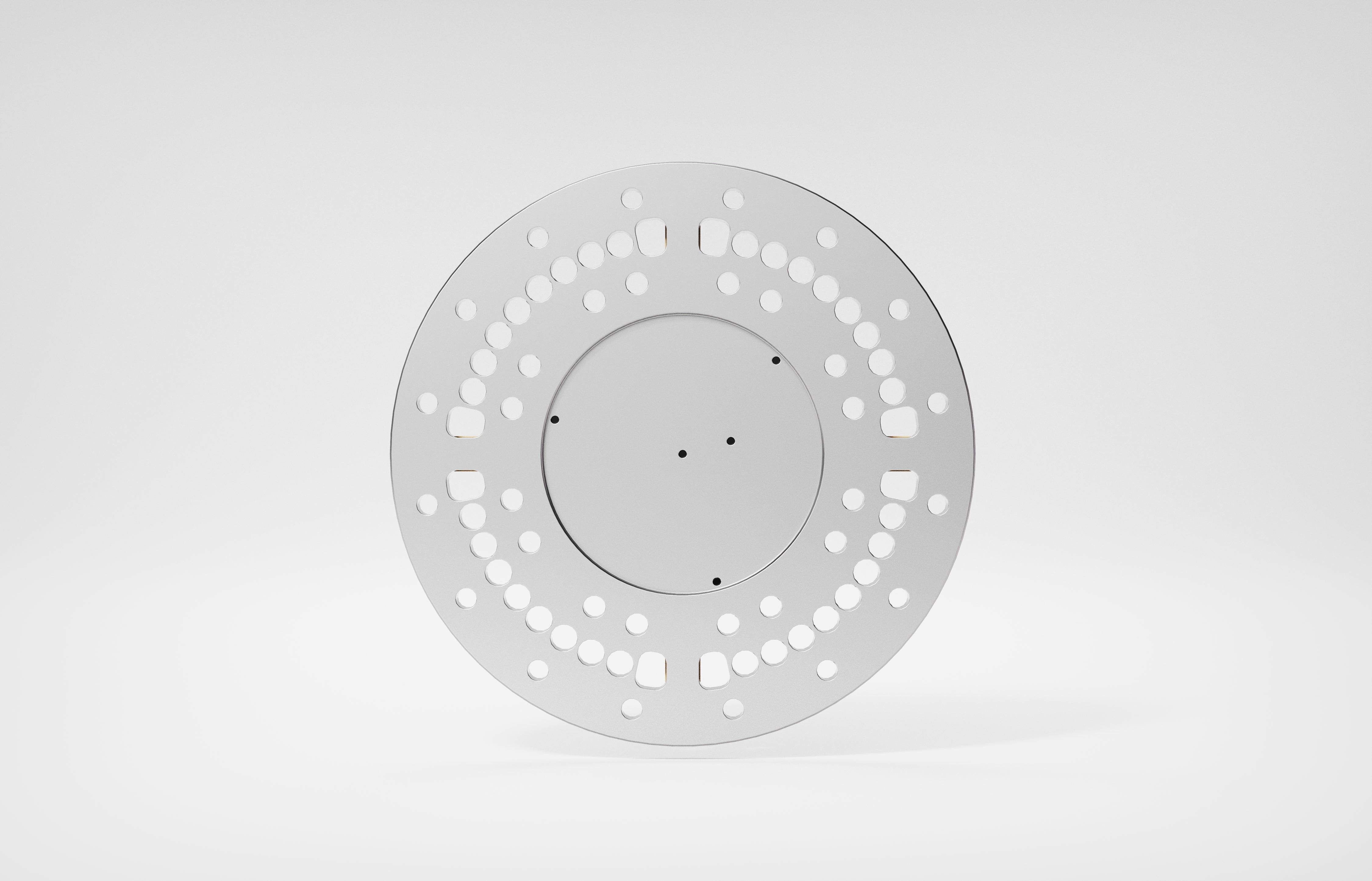
コンパクトで軽量
パフォーマンスを犠牲にすることなく簡単に統合できるスリムなデザイン。
高精度
0.2% の精度で正確かつ再現性のある測定を実現します。
デザインイノベーション
メカニズムとエレクトロニクスにおける 2 層の独立した設計アーキテクチャ。
Crosstalk Elimination
Minimizes axis interference for pure torque measurement.
Provides accurate force/torque feedback essential for advanced control tasks.
High Overload Stability
Engineered to withstand loads beyond rated capacity without structural failure.
Ensures long-term durability and reliability in demanding industrial environments.
Harmonic Drive Compatibility
Designed with standardized flange dimensions for harmonic drive integration.
Ensures seamless mechanical coupling and stable torque transmission without modification.
Technical Specs
Delivers accuracy performance optimized for precise robotic control.
Accuracy Performance
- Linearity ±0.2% F.S.
- Hysteresis ±0.2% F.S.
- Crosstalk ±0.5% F.S.
- Temp. Drift ±0.1% F.S./10℃

Sensor Specification
Ensures durability and stability under diverse mechanical loads.
| Category | Item | Rated |
|---|---|---|
| Torque Capacity | Maximum Torque | 300% |
| Break Torque | 600% | |
| Bending Strength | Allowable Bending Moment | 100% |
| Destructive Bending Moment | 300% | |
| Axial Load | Allowable Axial Load | ~5× |
| Destructive Axial Load | ~220× | |
| Radial Load | Allowable Radial Load | ~9× |
| Destructive Radial Load | ~160× | |
| Rigidity | Torsional Rigidity | — |
| Moment Rigidity | - |
- 上記の仕様は主要モデルを表しています。
- 当社は、さまざまな用途に合わせて 10Nm から 1000Nm までの全範囲を取り揃えています。
- 製品ラインナップはこちら→
Operational Specifications
Provides reliable performance across electrical, communication, and environmental conditions.
| Category | Item | Specification | Remarks |
|---|---|---|---|
| Power & Electrical | Supply Voltage | 24V ±10% | DC Input |
| Power Rise Time | ≤ 1 sec | — | |
| Current Consumption | ≤ 40 mA | — | |
| Communication | Communication Method | RS-485 (2-wire) | Baud rate: 3 Mbps |
| Output Noise | ±0.1% F.S. | — | |
| Environmental | Operating Temp. Range | 0℃ ~ 80℃ | — |
| Storage Temp. Range | -20℃ ~ 100℃ | — | |
| Operating Humidity | 20% ~ 85% RH | Non-condensing | |
| Storage Humidity | 20% ~ 70% RH | — | |
| Ingress Protection | Equivalent to IP50 | — | |
| Insulation Resistance | ≥1 MΩ (100VDC) | — | |
| Thermal Accuracy | Temperature Accuracy | ±0.2℃ | — |
製品データと仕様を比較する



お問い合わせ
ご質問やお見積りをご希望の場合は、お気軽にお問い合わせください。
ご質問がございましたら、いつでもお気軽にお問い合わせください。平日24時間以内にできるだけ早くご返答いたします。
顧客サポート
このテキストを使用して、顧客の質問にできるだけ詳細に回答します。
よくある質問
このテキストを使用して、顧客の質問にできるだけ詳細に回答します。
お問い合わせ
このテキストを使用して、顧客の質問にできるだけ詳細に回答します。