
Everyone talks about accuracy.
But in a joint that must repeat the same motion thousands of times, true accuracy begins with structure.
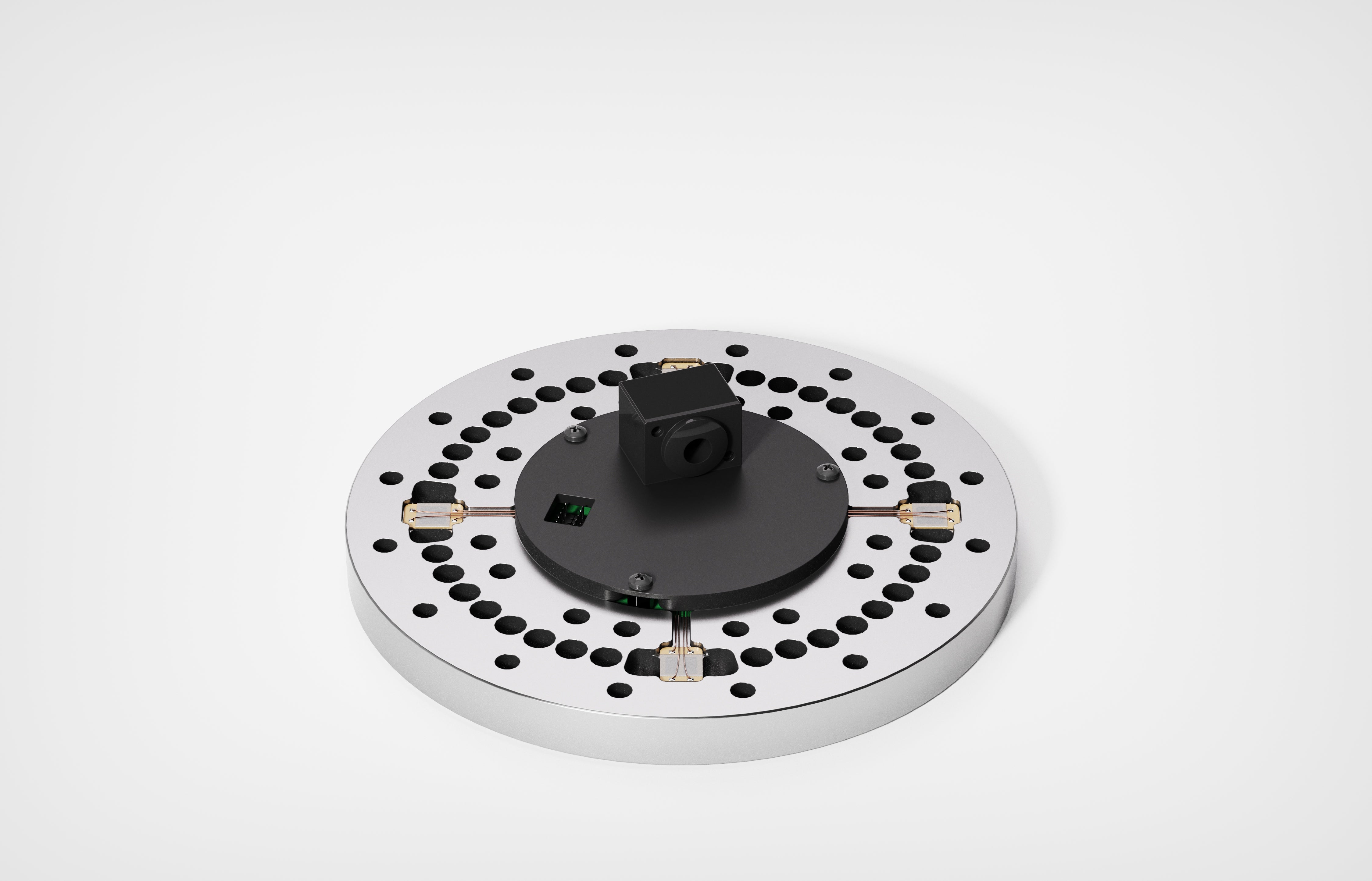
At AL.Robot, we start from fundamentals: how force flows, how strain gauges take stress.
Through FEM analysis, optimized gauge placement, and automated validation,
we build sensors that prevent errors instead of correcting them.
Accuracy by design — not by adjustment.

Key Features
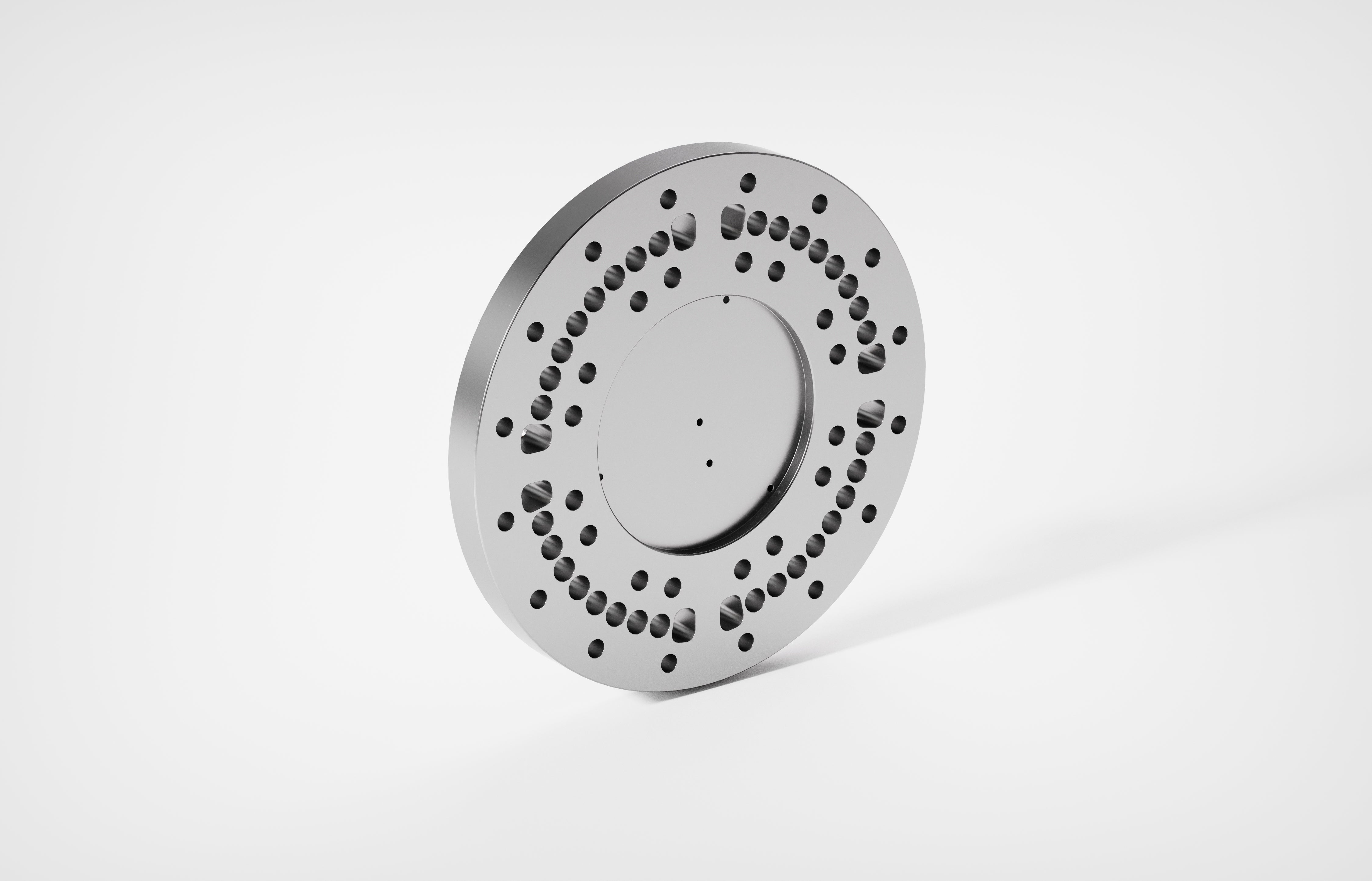
Our joint torque sensors are engineered with structures that prioritize reliability from the start.
Each feature reflects our commitment to precise measurement, robust design, and seamless integration into robotic joints.
High Reliability & Precision
Delivers stable torque output even under repeated loads, maintaining ±0.2% F.S. accuracy.
Ensures consistent feedback for precise and safe robotic joint control.
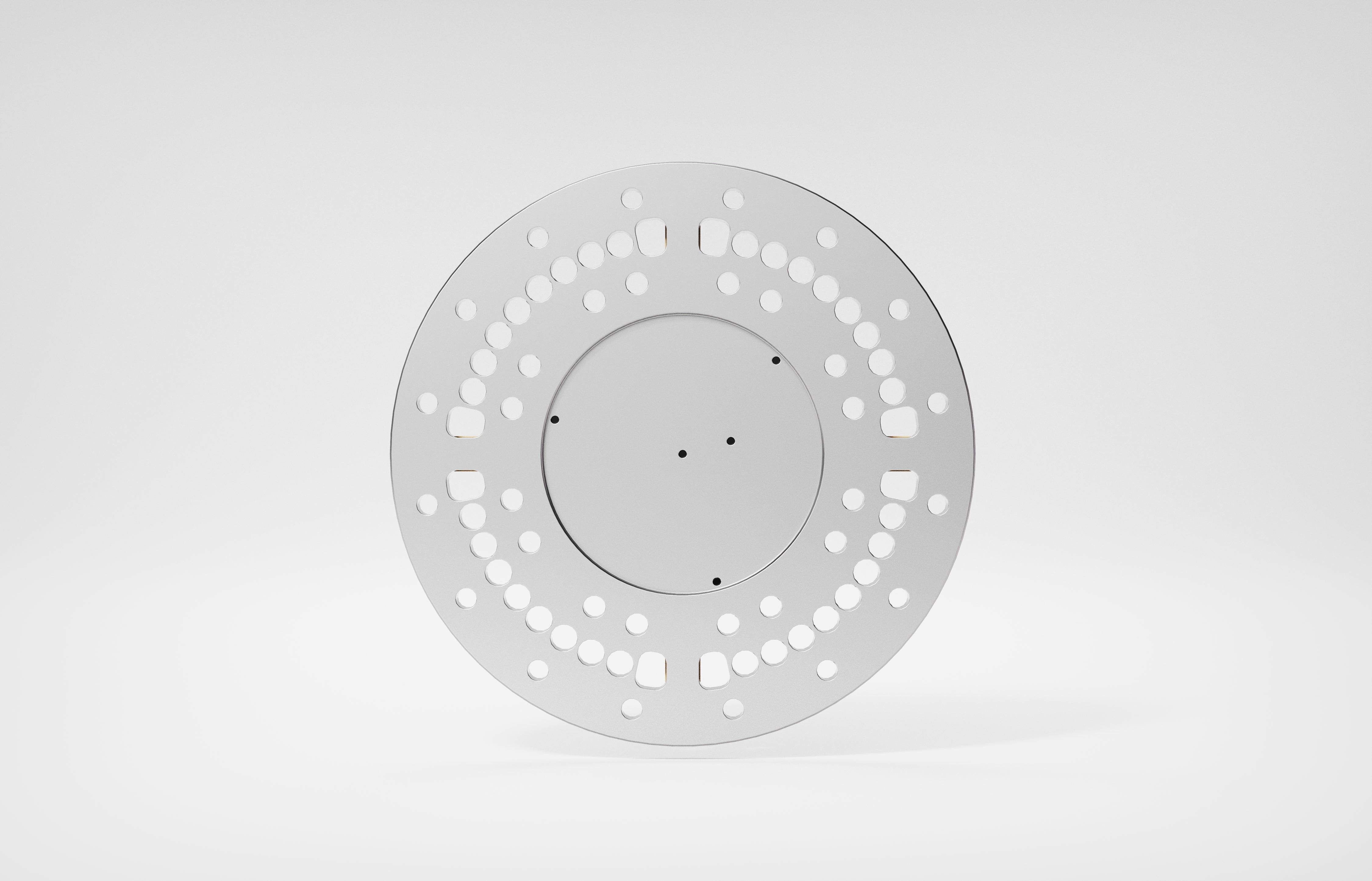
Compact & Lightweight
Slim, high-strength design optimized for integration into collaborative and humanoid robots.
Reduces payload burden while maximizing structural rigidity.
Dual-Channel System
Independent A/B signal outputs enhance redundancy and operational safety.
Supports RS-485 dual communication for robust system reliability.
Crosstalk Elimination
Minimizes axis interference for pure torque measurement.
Provides accurate force/torque feedback essential for advanced control tasks.
High Overload Stability
Engineered to withstand loads beyond rated capacity without structural failure.
Ensures long-term durability and reliability in demanding industrial environments.
Harmonic Drive Compatibility
Designed with standardized flange dimensions for harmonic drive integration.
Ensures seamless mechanical coupling and stable torque transmission without modification.
Technical Specs
Delivers accuracy performance optimized for precise robotic control.
Accuracy Performance
- Linearity ±0.2% F.S.
- Hysteresis ±0.2% F.S.
- Crosstalk ±0.5% F.S.
- Temp. Drift ±0.1% F.S./10℃

Sensor Specification
Ensures durability and stability under diverse mechanical loads.
| Category | Item | Rated |
|---|---|---|
| Torque Capacity | Maximum Torque | 300% |
| Break Torque | 600% | |
| Bending Strength | Allowable Bending Moment | 100% |
| Destructive Bending Moment | 300% | |
| Axial Load | Allowable Axial Load | ~5× |
| Destructive Axial Load | ~220× | |
| Radial Load | Allowable Radial Load | ~9× |
| Destructive Radial Load | ~160× | |
| Rigidity | Torsional Rigidity | — |
| Moment Rigidity | - |
- Accuracy standards may vary depending on the product model and specifications.
- Certain precision parameters can be adjusted upon customer request.
- For higher accuracy requirements, customization is available through prior consultation.
Operational Specifications
Provides reliable performance across electrical, communication, and environmental conditions.
| Category | Item | Specification | Remarks |
|---|---|---|---|
| Power & Electrical | Supply Voltage | 24V ±10% | DC Input |
| Power Rise Time | ≤ 1 sec | — | |
| Current Consumption | ≤ 40 mA | — | |
| Communication | Communication Method | RS-485 (2-wire) | Baud rate: 3 Mbps |
| Output Noise | ±0.1% F.S. | — | |
| Environmental | Operating Temp. Range | 0℃ ~ 80℃ | — |
| Storage Temp. Range | -20℃ ~ 100℃ | — | |
| Operating Humidity | 20% ~ 85% RH | Non-condensing | |
| Storage Humidity | 20% ~ 70% RH | — | |
| Ingress Protection | Equivalent to IP50 | — | |
| Insulation Resistance | ≥1 MΩ (100VDC) | — | |
| Thermal Accuracy | Temperature Accuracy | ±0.2℃ | — |
- Items indicated can be customized according to customer requirements.

What Makes a Smart Robotics Partner?
AL.Robot brings together precision engineering and real-world applicability — a trusted combination for advanced robotic systems.

Why AL.Robot?
Discover the reasons as to what makes AL.Robot sensors unique from the competition.

Contact Us
Have a question or need a quote? Get in touch — we’re here to help.
If you have any questions, you are always welcome to contact us. We'll get back to you as soon as possible, within 24 hours on weekdays.
Customer Support
Use this text to answer questions in as much detail as possible for your customers.
FAQ’s
Use this text to answer questions in as much detail as possible for your customers.
Contact Us
Use this text to answer questions in as much detail as possible for your customers.